Robot Unitree A1
Z możliwością rozbudowy
Zapytaj o wycenę
Formularz poniżej lub e-mail: robot@unitree-robot.pl
Sprawdzi się w każdych warunkach
Robot pies A1 to doskonałe rozwiązanie dla użytkowników szukających wszechstronnego robota czworonożnego o wysokiej stabilności i zaawansowanych funkcjach. Dzięki solidnej konstrukcji, nowoczesnym czujnikom i szerokim możliwościom programowania, A1 spełni oczekiwania zarówno w zastosowaniach przemysłowych, jak i w zastosowaniach konsumenckich.
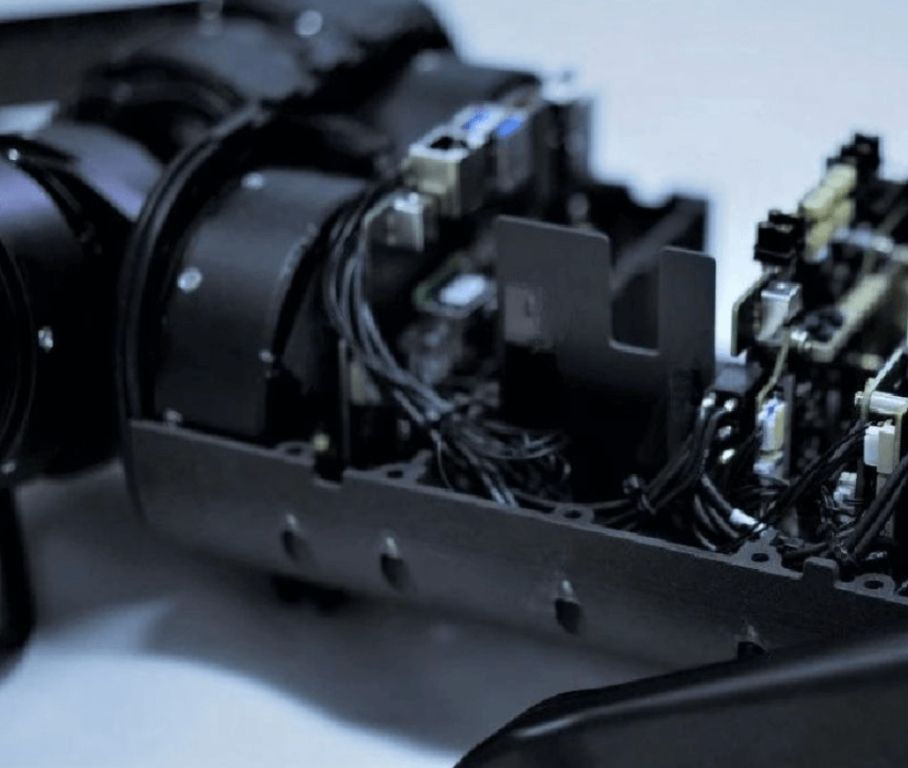
Silniki i Chłodzenie
- Precyzyjny silnik przegubowy ze stopu aluminium:
- Szybka i łatwa konserwacja mechanizmów
- Duża ilość interfejsów: 2xHDMI, 2xEthernet, 4xUSB
- Programowanie wtórne API (Real time)
Podstawowe dane techniczne
| Kamera stereo głębi -podczerwień Intel RealSense | z przodu |
| Zasięg pomiaru kamery | Od 0,3m do 10m |
| Transmisja Video HD | w czasie rzeczywistym |
| Wykrywanie ludzi, uczenie maszynowe | Tak |
| Czujniki nacisku na końcówkach nóg robota | Tak |

Robot porusza się z prędkością do 11 km/h. Wyposażony w algorytm szybkiego reagowania na sytuacje awaryjne.
Inteligentny robot z kamerą na podczerwień
Mimo, że robot posiada wiele czujników możemy go wyposażyć w dodatkowe moduły takie jak: radar, kamera szerokokątna, interkom, mikrofon kierunkowy, czujnik ultradźwięku. Dodatkową opiją jest moduł sztucznej inteligencji pozwalający na rozpoznawanie gestów oraz uczenie się maszynowe.

Jesteś zainteresowany
Prześlij zapytanie, przygotujemy ofertę.
Robot porusza się dynamiczne i precyzyjne, wyposażony w czujniki nacisku w stopach.

Wersja standardowa A1
Kamera podczerwieni dalekiego zajęto
Programowania wtórne API w czasie rzeczywistym
Transmisja HD w czasie rzeczywistym
Rozpoznawanie ludzi, interakcje
Wersja rozszerzona A1
LIDAR – mapowanie terenu
Moduł sztucznej inteligencji
Rozpoznawanie ludzi
Rozpoznawanie gestów
Uczenie maszynowe
Opcjonalne moduły do rozbudowy robota A1

Silniki, czujniki nacisku, złącza
Robot jest wyposażony w szereg złącz
Silnik
- Moment obrotowy przegubu: 33,5 Nm (MAX)
- Maksymalna prędkość przegubu: 21 rad/s
- Przeguby pozwalają na szybki demontaż i łatwą konserwację
- Przemysłowe łożyska wałeczkowe krzyżowe o długiej żywotności i odporności na wstrząsy osiowe
- Odczyt wszystkich danych z czujników
- Możliwość przesyłania osobnych poleceń dotyczących pozycji, prędkości i momentu obrotowego do każdego silnika

Cztery czujniki nacisku na stopach
- Dokładny dostęp do informacji o podparciu stóp jest bardziej niezawodny, wydajny i wygodny.
Bogate interfejsy zewnętrzne
- HDMI x 2
- Port Ethernet x 2
- USB x 4
Pojemna i wytrzymała bateria
Robot A1 jest wyposażony w szereg złącz pozwalających na komunikację z urządzeniami zewnętrznymi
Konstrukcja oraz układ
- Wytrzymała, lekka struktura kadłuba, łatwa i wygodna konserwacja.
- Zewnętrzny interfejs zasilania
- Wejście zasilania zewnętrznego 24V
- Zewnętrzne zasilanie wyjściowe 5V, 12V, 19V, łatwe podłączenie do urządzeń rozszerzających.
- Standardowy podwójny system sterowania
- Sterowanie percepcją oraz ruchem.
- Zewnętrzne interfejsy
- 4 porty USB
- 2 porty HDMI
- 2 porty Ethernet.
- Standardowa kamera głębi RealSense
- Funkcje mapowania oraz unikania przeszkód w czasie realnym
- Opcjonalny moduł sztucznej inteligencji
- Opcjonalne akcesoria: interkom – sterownie głosem, mikrofon kierunkowy, kamera ultra-szerokokątna, czujnik ultradźwięków

Czujniki na końcówkach nóg
- Zintegrowany czujnik siły na każdej końcówce nogi umożliwia robotowi percepcję stanu kontaktu końcówki nogi w czasie rzeczywistym, niezależnie od stanu ruchu.
- Czujniki siły sprzętowej oraz czujniki prądu silnika do pomiaru siły na końcówkach nóg są zintegrowane w programie, co zapewnia lepszą czułość i niezawodność.
- Końcówki nóg są wodoodporne i pyłoszczelne, a ich wymiana jest łatwa.
- Robot oblicza siłę nacisku w czasie rzeczywistym i przekazuje informacje do silników w celu osiągnięcia maksymalnej stabilności.
Mapowanie 3D LiDAR
Dzięki opcjonalnemu LiDAR-owi i dedykowanej aplikacji możesz stworzyć mapę w chmurze punktów w określonym obszarze i określić ścieżkę, po której robot będzie się poruszać autonomicznie.
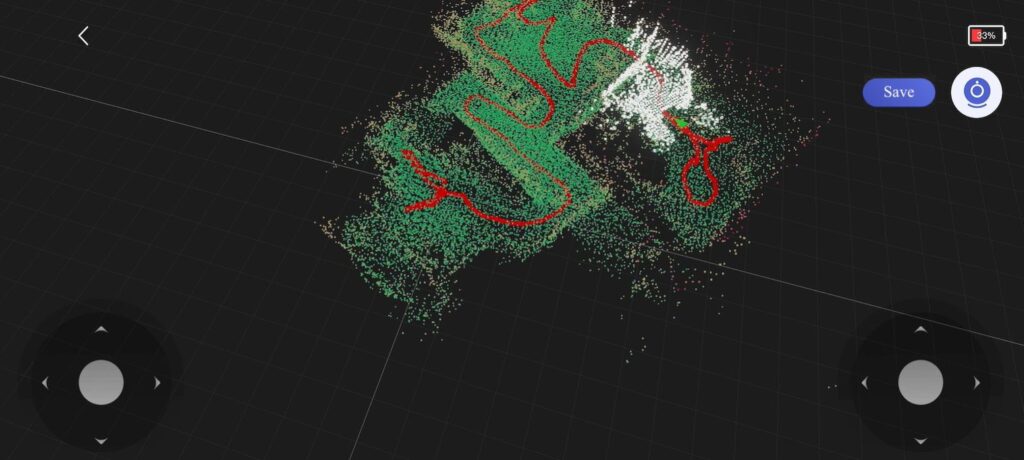
Tabela paramentów technicznych
| A1 | Dane |
|---|---|
| Wymiary | 620mmx300mm |
| Maksymalny udźwig | do 5kg |
| Czas pracy | od 1h do 2,5h (w zależności od wykorzystanie robota) |
| Maksymalna prędkość poruszania | 11 km/h |
| Zabezpieczanie przed upadkiem | Algorytm |
| Materiał | Wytrzymałe tworzywo konstrukcyjne |
| Czujniki nacisku w nodze robota | Aktywny czujnik nacisku |
| Zewnętrzne gniazdo wejściowe | 24V |
| Złącza zewnętrzne | 4 x USB, 2 x HDMI, 2 x Ethernet |
| Zewnętrze gniazdo wyjściowe | 5V, 12V, 19V do zasilania urządzeń peryferyjnych |
| Programowanie wtórne | API w czasie rzeczywistym |
| Kamera stereo głębi | RealSense |
| Zasięg kamery głębi (podczerwień) | 0,8m-10m |
| Błąd pomiaru w zasięgu 2m | < 2% |
| Rozpoznawanie ludzi | TAK |
| Rozpoznawanie gestów | TAK |
| Poruszanie się za ludźmi | W zasięgu wizualnym |
| Opcjonalny moduł sztucnej inteligencji | TAK |
| Uczenie maszynowe | TAK |
| Szerokokątna kamera HD | TAK |
| Transmisja w czasie rzeczywistym | TAK |
| Omijanie przeszkód w czasie rzeczywistym | TAK |
| LIDAR (opcja) | Mapowanie, pozycjonowanie, dynamiczne omijanie |
| Sterowane głosowe | Opcja |
| Mikrofony kierunkowe | Opcja |
| Czujnik ultradźwięków | Opcja |
| Wymienne czujniki nacisku na końcówce nogi | TAK |
Ważne wskazówki i uwagi:
Ten produkt jest robotem cywilnym. Uprzejmie prosimy, aby wszyscy użytkownicy powstrzymali się od dokonywania niebezpiecznych modyfikacji lub używania robota w sposób niebezpieczny.