Robot Unitree B2
Duży robot przemysłowy o wielu funkcjach
Cena na zapytanie
Podstawowa konfiguracja robota
Unitree B2 Przekraczaj Granice w Zastosowaniach Przemysłowych
- Najszybszy przemysłowy robot czworonożny – prędkość do 6 m/s.
- Wszechstronność i niezawodność w różnych środowiskach.
- Doskonała adaptacja do terenu – stabilna praca na śliskich lub nierównych powierzchniach.
- Bezproblemowe pokonywanie schodów – jakby były płaskie.
- Niezrównana stabilność podczas wspinania się po schodach, łatwo pokonuje stopnie, zachowując równowagę.
- 170% wzrost wydajności stawów – moment obrotowy 360 N.m.
- Ekstremalne osiągi zapewniające większą elastyczność i stabilność w operacjach przemysłowych.
- Pokonywanie przeszkód – stabilny i wytrzymały. Łatwo przekracza stosy drewna, platformy o wysokości 40 cm i inne przeszkody.
- 100% wzrost wytrzymałości i 200% zwiększenie zasięgu
- 100% wzrost wytrzymałości – ciągły marsz z obciążeniem większym niż 40 kg.
- Marsz z obciążeniem 20 kg może trwać ponad 4 godziny, z zasięgiem ponad 15 km.
- 200% zwiększenie zasięgu – ciągły marsz bez obciążenia z zasięgiem większym niż 20 km przez ponad 5 godzin.
- Formy kołowe i czworonożne – przełamywanie ograniczeń wytrzymałości.
- Innowacyjny design strukturalny B2 umożliwia przełączanie między formą czworonożną a kołową (opcja).
Podstawowe dane techniczne
| Wymiary w pozycji stojącej | 1098mmx450mmx645mm |
| Waga wraz z baterią | Około 60kg |
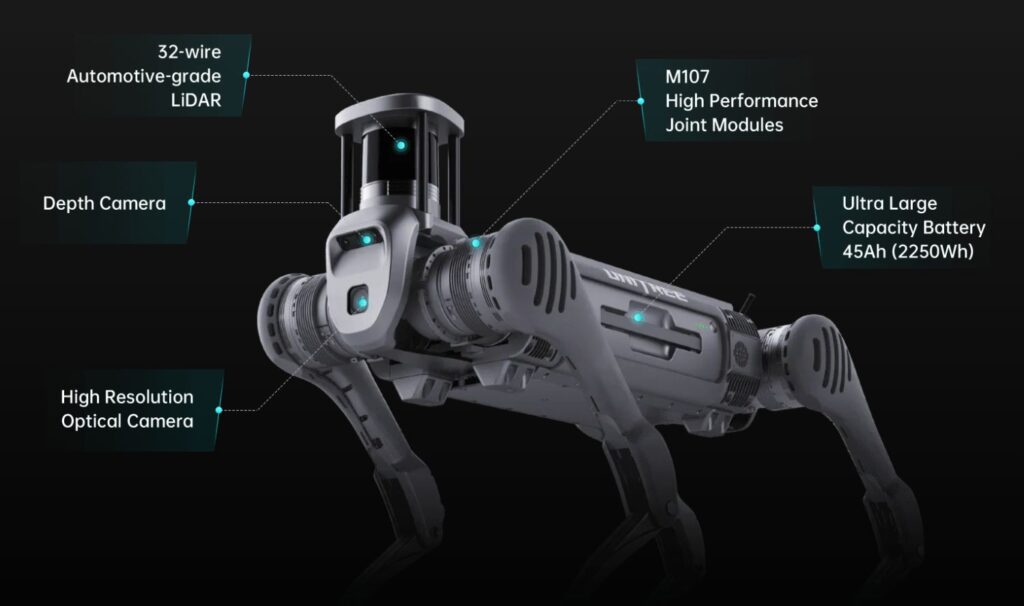
| LIDAR i kamera | 3D LiDAR ×1 + Kamera głębi ×2 + Kamera optyczna ×2 (Różni się w zależności od konfiguracji) |
| Maksymalne obciążenie robota | W pozycji stojącej 120 kg. Podczas chodzenia około 40 kg |
| Pokonywanie przeszkód | Schody do 40cm do przodu. Sypki piach. Pryzmy z luźnym materiałem – cegły, kamienie itp. |
| Przeskok z platformy na platformę | od 0,5m do 1,2m |
| Odporność na wodę. | Klasa szczelności IP67 |
Robot B2 opcjonalnie może być wyposażony w koła
Robot B2 w szybkim tempie pokonuje wysokie schody. Zachowuje równowagę, trudno go zatrzymać.
Robot B2 pokona nawet 20 km na jednym ładowaniu
Robot przemysłowy B2 potrafi konać trudny teren. Na płaskich powierzchniach porusza się bardzo szybko i może pokonać odległość do 20km na jednym ładowaniu. Dodatkowo obudowa robota jest wykonana w normie szczelności IP67 dzięki czemu robot porusza się w deszczu. Odpowiednie algorytmy zapewniają wysoką stabilność na wiatr i boczne uderzenia. Temperatura pracy robota od -20 stopni do + 50 stopni.

Jesteś zainteresowany
Prześlij zapytanie, przygotujemy ofertę.
Robot pies porusza się dynamiczne i precyzyjne z prędkością do 21 km/h
Wymienna bateria w robocie
Pojemność akumulatora 45 Ah (2250 Wh)
Napięcie 58 V
Żywotność baterii 4-6h
Rozpoznawanie ludzi, interakcje
Bezprzewodowe ładowania robota
Robot przy niskim stanie sam znajduje ładowarkę
Szybki moduł ładowania
Szybka wymiana baterii bez narzędzi
Silniki, czujniki nacisku, złącza
Robot jest wyposażony w szereg złącz
Silnik
- Moment obrotowy przegubu: 360 Nm (MAX)
- Maksymalna prędkość przegubu: 21 rad/s
- Przeguby pozwalają na szybki demontaż i łatwą konserwację
- Przemysłowe łożyska wałeczkowe krzyżowe o długiej żywotności i odporności na wstrząsy osiowe
- Odczyt wszystkich danych z czujników
- Możliwość przesyłania osobnych poleceń dotyczących pozycji, prędkości i momentu obrotowego do każdego silnika

Cztery czujniki nacisku na stopach
- Dokładny dostęp do informacji o podparciu stóp jest bardziej niezawodny, wydajny i wygodny.
Bogate interfejsy zewnętrzne
- 1000M-Base-Ethernet×4 USB3.0×4
- 12V×4 5V×1 24V×4 BAT×1
Robot pies B2 przechodzi przez palety o wysokości 40cm oraz pokonuje stos kawałków drewna
Stabilizacja oraz wysoki moment obrotowy silników
Robot adaptuje się do śliskich powierzchni zachowując równowagę nie przewraca się
Robot czworonożny pies skacze ze stołu na ruchomą platformę
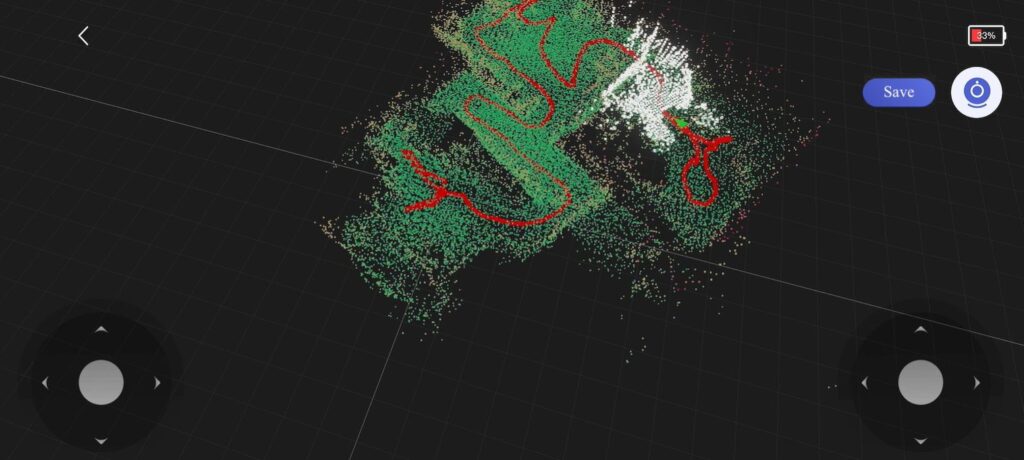
Mapowanie 3D LiDAR
Dzięki opcjonalnemu LiDAR-owi i dedykowanej aplikacji możesz stworzyć mapę w chmurze punktów w określonym obszarze i określić ścieżkę, po której robot będzie się poruszać autonomicznie.
Robot B2 sprawdzi się w fabryce w ciężkich warunkach. Pokonuje schody o nachyleniu 45 stopni. Przenosi urządzenia pomiarowe
Tabela paramentów technicznych
| B2 | Dane |
|---|---|
| Wymiary w pozycji stojącej | 1098 mm × 450 mm × 645 mm |
| Waga całkowita wraz z baterią | 60 kg |
| Maksymalny udźwig w pozycji stojącej | do 120 kg |
| Maksymalny udźwig podczas chodu | do 40 kg |
| Czas pracy | od 2h do 4h (w zależności od wykorzystanie robota) |
| Maksymalna prędkość poruszania | 15 km/h (ograniczona ze względu na bezpieczeństwo) |
| Zabezpieczanie przed upadkiem | Algorytm |
| Materiał | Wytrzymałe tworzywo konstrukcyjne |
| Czujniki nacisku w nodze robota | Aktywny czujnik nacisku |
| Pokonywanie trasy | Chodzenie bez obciążenia > 5h, przebieg > 20km Chodzenie z obciążeniem 20kg > 4h, przebieg> 15km |
| Złącza zewnętrzne | 1000M-Base-Ethernet×4 USB3.0×4 12V×4 5V×1 24V×4 BAT×1 |
| Pokonywanie schodów | wysokość 20cm-25cm |
| Kąt nachylenia schodów i terenu | do 45 stopni |
| Pokonywanie przeszkód | do wysokości 40cm |
| Przechodzenie nad pustą przestrzenią | 0,5m do 1,2m |
| Maksymalny skok | do 1,6m |
| Błąd pomiaru w zasięgu 2m | < 2% |
| Rozpoznawanie ludzi | TAK |
| Rozpoznawanie gestów | TAK |
| Poruszanie się za ludźmi | W zasięgu wizualnym oraz LIDAR 3D |
| Uczenie maszynowe | TAK |
| Szerokokątna kamera HD | TAK |
| Transmisja w czasie rzeczywistym | TAK |
| Omijanie przeszkód w czasie rzeczywistym | TAK |
| LIDAR | Mapowanie, pozycjonowanie, dynamiczne omijanie |
| Wodoszczelność | Stopień ochrony IP67 |
| Moduł sterowania i kontroli | Konfiguracja standardowa: Intel Core i5 (funkcja platformy), Intel Core i7 (rozwój użytkownika) Opcjonalna konfiguracja: Intel Core i7 i Jetson Orin NX (maksymalnie do 3 urządzeń) |
| Czujniki i nawigacja | 3D LiDAR ×1 + Kamera głębi ×2 + Kamera optyczna ×2 (Różni się w zależności od konfiguracji) |
| Wymienne czujniki nacisku na końcówce nogi | TAK |
Ważne wskazówki i uwagi:
Ten produkt jest robotem cywilnym. Uprzejmie prosimy, aby wszyscy użytkownicy powstrzymali się od dokonywania niebezpiecznych modyfikacji lub używania robota w sposób niebezpieczny.
W praktyce ze względów bezpieczeństwa obowiązuje ograniczenie prędkości
Część funkcji wymaga pracy człowieka lub wtórnego programowania
Powyższe parametry mogą się różnić w różnych scenariuszach zastosowań i różnych konfiguracjach, proszę odnieść się do rzeczywistej sytuacji.