LASEROWY LIDAR L2
Bioniczny radar laserowy 3D
Zapytaj o wycenę
Formularz poniżej lub e-mail: robot@unitree-robot.pl
LIDAR L2 to nowy model oparty na algorytmie POINT-LIO
LIDAR Unitree L2 – Nowoczesne rozwiązanie do precyzyjnego mapowania 3D
Unitree L2 to zaawansowany system LIDAR nowej generacji, zaprojektowany z myślą o wysokiej precyzji mapowania i nawigacji autonomicznych robotów. Dzięki pełnemu otwartemu rozwiązaniu SLAM, L2 umożliwia dokładne skanowanie 3D otoczenia bez potrzeby stosowania dodatkowych sensorów pozycjonujących. Oparty na algorytmie POINT-LIO, L2 oferuje bezkonkurencyjną jakość mapowania zarówno w warunkach wewnętrznych, jak i zewnętrznych.
Najważniejsze parametry techniczne LIDAR L2:
✅ 360° × 96° – Ultraszerokokątne skanowanie
✅ Minimalna strefa martwa: 0.05 m – Dokładna detekcja obiektów w pobliżu
✅ Zasięg: 30 m (@90% refleksyjności) – Precyzyjna analiza dalekiego zasięgu
✅ Częstotliwość skanowania: 64 000 punktów/s – Zaawansowana rekonstrukcja 3D
✅ Dokładność pomiaru: 2 cm – Wysoka rozdzielczość detekcji obiektów
✅ Waga: 230 g – Lekka konstrukcja ułatwiająca integrację
✅ Interfejs komunikacji: ENET UDP / TTL UART – Szybka transmisja danych
✅ Kompaktowy rozmiar: 75 × 75 × 65 mm – Łatwa integracja w systemach robotycznych
Nowy standard precyzji i wydajności:
🔹 64000 punktów/s – Synchronizacja i poprawa dokładności o 200%
🔹 Rozdzielczość odległości: 4,5 mm – Poprawiona o 78% względem wcześniejszych modeli
🔹 Kąt skanowania: 360° × 96° – Poprawiona jakość o 7%
Zastosowania LIDAR L2:
📍 Dynamiczne skanowanie wnętrz
L2 umożliwia szybkie i dokładne uzyskanie trójwymiarowej struktury całego budynku, co znacząco ułatwia pozycjonowanie oraz autonomiczną nawigację robotów mobilnych. Dzięki temu roboty mogą z łatwością realizować zadania, takie jak automatyczne sprzątanie, organizacja przestrzeni oraz mapowanie wnętrz.
🌍 Skanowanie rzeczywistych scen na zewnątrz
LIDAR L2 skutecznie radzi sobie z zakłóceniami światła otoczenia zarówno wewnątrz, jak i na zewnątrz. Nawet przy silnym oświetleniu zewnętrznym o natężeniu 100 kLx, zapewnia stabilne pomiary odległości oraz wysokiej precyzji mapowanie 3D.
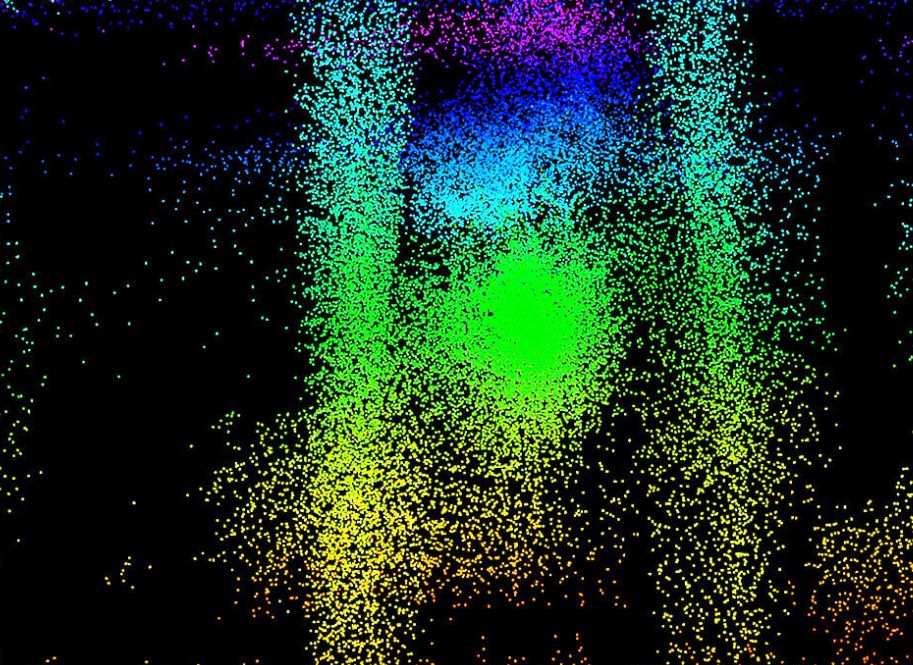
🔄 Niesekwencyjne skanowanie 3D
L2 wykorzystuje niepowtarzalne skanowanie ultra-szerokokątne, co pozwala na uzyskanie niezwykle gęstych i precyzyjnych danych chmury punktów. Dzięki temu generowane mapy mają jakość zbliżoną do fotografii, co pozwala na ich wykorzystanie w zaawansowanych systemach autonomicznych.
Podstawowe dane techniczne
| Zakres skanowania | 360×90 stopni |
| Inercyjna jednostka pomiarowa IMU | 3-osiowe przyspieszenie + 3-osiowy żyroskop |
| Technologia | Laserowa TOF |
| Metoda skanowania | Skanowanie z obrotowym lustrem |
| Środowisko pracy | Na zewnątrz/wewnątrz |
Przełom w Mobilności Robotów
Wprowadzenie bionicznego LIDAR-u 4D L1 przez Unitree Robotics to istotny krok naprzód w dziedzinie mobilnej robotyki. Dzięki zaawansowanej technologii skanowania, L1 umożliwia robotom nie tylko dokładniejsze mapowanie i nawigację, ale także optymalizację kosztów produkcji i eksploatacji.
LIDAR L1 jest idealnym rozwiązaniem dla nowoczesnych robotów, które muszą operować w różnorodnych, często trudnych warunkach. Jego zaawansowane funkcje pozwalają na realizację złożonych zadań, od autonomicznej nawigacji po precyzyjne mapowanie terenu, co czyni go nieocenionym narzędziem w rozwoju inteligentnej robotyki.
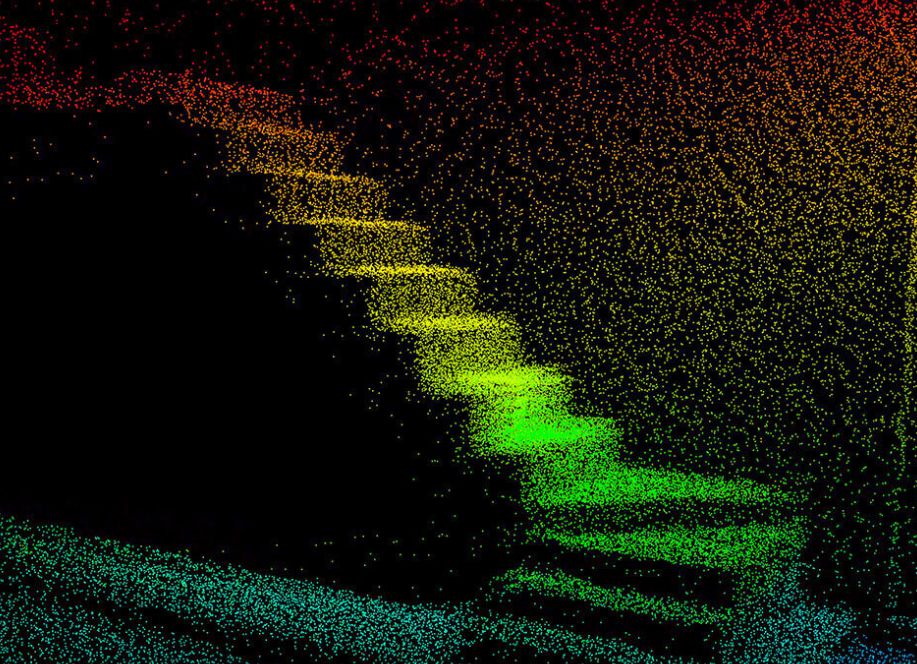
Dynamiczne skanowanie całego domu
Mapowanie pomieszczeń skanerem laserowym LIDAR L1
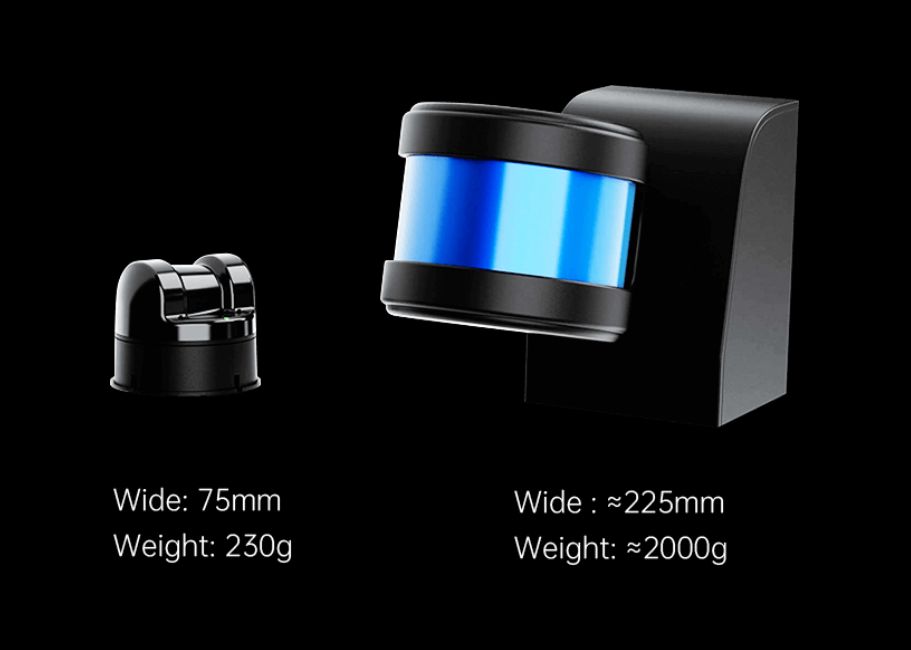
Kompaktowy rozmiar
Kompaktowy rozmiar 75×75×65mm
Waży tylko 230 g, co zapewnia łatwą instalację
Ultra szeroki kąt
Duże dookólne pole widzenia (pole widzenia 360×90 stopni

Jesteś zainteresowany
Prześlij zapytanie, skonfigurujemy dla Ciebie robota.
Wykrywanie różnych obiegów przezroczystych
🔍 Dlaczego warto wybrać Unitree L2?
✅ Precyzja mapowania na poziomie przemysłowym
✅ Zaawansowana odporność na zakłócenia świetlne
✅ Lekka i kompaktowa konstrukcja
✅ Wydajna technologia SLAM dla robotów autonomicznych
Unitree L2 to przyszłość robotyki i precyzyjnego mapowania 3D – idealne rozwiązanie dla naukowców, inżynierów oraz producentów robotów mobilnych i autonomicznych systemów nawigacyjnych.
📌 Sprawdź, jak LIDAR L2 może zrewolucjonizować precyzyjne skanowanie w Twoim projekcie! 🚀
Unitree L2 to zaawansowany 4D LiDAR, oferujący kompletne, otwartoźródłowe rozwiązanie SLAM. Dzięki wbudowanemu IMU i zastosowaniu algorytmu POINT-LIO, umożliwia precyzyjne mapowanie bez potrzeby dodatkowych sensorów pozycjonujących. unitree.com
Kluczowe cechy techniczne:
- Ultra-szerokokątne skanowanie: 360°×96°
- Minimalna strefa martwa: 0,05 m
- Maksymalny zasięg: 30 m przy 90% refleksyjności
- Częstotliwość skanowania: 64 000 punktów/s
- Dokładność pomiaru: 2 cm
- Waga: 230 g
- Interfejs komunikacyjny: ENET UDP/TTL UART
- Kompaktowe wymiary: 75×75×65 mm
Zastosowania:
- Dynamiczne skanowanie wnętrz: L2 szybko i precyzyjnie pozyskuje trójwymiarowe informacje o strukturze całego domu, co ułatwia pozycjonowanie i autonomiczną nawigację robotów mobilnych.
- Skanowanie terenów zewnętrznych: L2 skutecznie opiera się zakłóceniom światła otoczenia, zarówno wewnątrz, jak i na zewnątrz. W warunkach silnego oświetlenia zewnętrznego (100 kLx) zapewnia stabilne pomiary odległości i precyzyjne mapowanie.
- Niesekwencyjne skanowanie: Dzięki wszechkierunkowemu, ultra-szerokokątnemu skanowaniu niesekwencyjnemu, L2 generuje wysokiej precyzji i gęstości dane chmury punktów, osiągając efekt skanowania na poziomie fotograficznym.
Zalety w porównaniu z innymi technologiami:
- Szerokie pole widzenia (FOV): 360°×96°, przewyższające typowe kamery głębi i radary 3D.
- Niesekwencyjne skanowanie: Zapewnia bardziej szczegółowe dane w porównaniu z tradycyjnymi metodami skanowania.
- Niskie zużycie CPU: Przetwarzanie danych z L2 wymaga minimalnych zasobów procesora, co obniża dodatkowe koszty dla użytkownika.
- Minimalna strefa martwa: 0,05 m, co pozwala na detekcję obiektów znajdujących się bardzo blisko sensora.
Dodatkowe zasoby:
Dane chmury punktów: Dostępne są przykładowe dane zebrane przez L2, co pozwala na ocenę jego możliwości w rzeczywistych scenariuszach.
Otwarty SDK: Unitree udostępnia otwartoźródłowe SDK dla L2, umożliwiając integrację i rozwój własnych aplikacji.
Podsumowanie:
Unitree L2 to wszechstronny i precyzyjny sensor LiDAR, idealny do zastosowań w robotyce, inteligentnych miastach, logistyce i wielu innych dziedzinach wymagających dokładnego mapowania i nawigacji. Jego kompaktowa konstrukcja, zaawansowane funkcje i otwartoźródłowe wsparcie czynią go atrakcyjnym wyborem dla profesjonalistów i entuzjastów technologii.
FAQ – LIDAR Unitree L2
Najczęściej zadawane pytania dotyczące nowoczesnego systemu LiDAR do precyzyjnego mapowania 3D
1. Czym jest LIDAR Unitree L2?
LIDAR Unitree L2 to zaawansowany system laserowego skanowania 3D, który zapewnia 360° x 96° ultra-szerokokątne skanowanie, wysoką precyzję mapowania i kompletne rozwiązanie SLAM bez potrzeby stosowania dodatkowych sensorów pozycjonujących.
2. Jakie są główne zastosowania LIDAR-u L2?
L2 doskonale sprawdza się w:
✔ Robotyce mobilnej – umożliwia precyzyjną nawigację i autonomiczne poruszanie się robotów.
✔ Skanowaniu wnętrz – dynamiczne skanowanie budynków i tworzenie map 3D.
✔ Inspekcji terenów zewnętrznych – odporny na silne światło do 100 kLx, co umożliwia stabilne pomiary w warunkach zewnętrznych.
✔ Automatyzacji przemysłowej – mapowanie przestrzeni w magazynach i halach produkcyjnych.
✔ Badaniach naukowych – zbieranie wysokiej jakości danych do analizy otoczenia.
3. Jakie są kluczowe parametry techniczne L2?
✔ Rozdzielczość przestrzenna: 4,5 mm
✔ Dokładność pomiaru: ±2 cm
✔ Minimalna strefa martwa: 0,05 m
✔ Zasięg: 30 m przy 90% refleksyjności
✔ Częstotliwość skanowania: 64 000 punktów/s
✔ Interfejs komunikacyjny: ENET UDP / TTL UART
✔ Waga: 230 g
✔ Wymiary: 75 × 75 × 65 mm
4. Jak LIDAR L2 radzi sobie w warunkach zewnętrznych?
L2 posiada zaawansowaną odporność na zakłócenia świetlne i może pracować w warunkach silnego nasłonecznienia do 100 000 luksów (100 kLx). Dzięki szerokiemu kątowi skanowania 360° x 96°, doskonale odwzorowuje otoczenie w trudnych warunkach.
5. Jakie algorytmy wykorzystuje LIDAR L2?
L2 wykorzystuje algorytm POINT-LIO, który umożliwia otwartoźródłowe SLAM (Simultaneous Localization and Mapping). Dzięki wbudowanemu IMU, L2 nie wymaga dodatkowych czujników pozycjonujących, co obniża koszty implementacji.
6. Jakie są zalety niesekwencyjnego skanowania w LIDAR-ze L2?
✔ Bardziej precyzyjne odwzorowanie detali – skanowanie w wysokiej gęstości umożliwia uzyskanie punktowych chmur o jakości fotograficznej.
✔ Brak powtarzalnych wzorców – zapewnia dokładniejsze rekonstrukcje otoczenia w porównaniu do konwencjonalnych metod.
✔ Lepsza adaptacja do dynamicznych warunków – lepiej radzi sobie w zmieniających się środowiskach.
7. Czy LIDAR L2 można zintegrować z systemami ROS?
Tak, Unitree L2 jest kompatybilny z systemami ROS (Robot Operating System). Posiada otwarte SDK, co pozwala na łatwą integrację i dostosowanie do własnych aplikacji.
8. Jakie urządzenia mogą korzystać z LIDAR-u L2?
L2 można zintegrować z różnymi urządzeniami, takimi jak:
✔ Roboty mobilne (AGV, AMR, czworonożne roboty Unitree)
✔ Drony i pojazdy autonomiczne
✔ Systemy monitorowania przestrzeni
✔ Zrobotyzowane ramiona inspekcyjne
9. Czy L2 wspiera mapowanie w czasie rzeczywistym?
Tak! L2 umożliwia tworzenie map 3D w czasie rzeczywistym, co jest kluczowe w autonomicznych systemach nawigacyjnych oraz w aplikacjach SLAM.
10. Jakie są różnice między Unitree L2 a innymi sensorami LiDAR?
✔ Większe pole widzenia (360° x 96°) niż większość konkurencyjnych sensorów.
✔ Zaawansowana odporność na światło otoczenia, umożliwiająca działanie nawet w trudnych warunkach.
✔ Lekka i kompaktowa konstrukcja, ważąca zaledwie 230 g.
✔ Bezproblemowa integracja z robotyką mobilną i systemami ROS.
11. Jak mogę pobrać oprogramowanie i dane chmury punktów z L2?
Pliki z zasobami, SDK oraz przykładowe dane chmury punktów można pobrać bezpośrednio z oficjalnej strony Unitree Robotics:
Porównanie parametrów technicznych LIDAR-u L1, Kamery głębi podczerwieni oraz 3D Radaru
| MODEL | LIDAR UNITREE L1 | Kamera głębi podczerwieni | Szerokokątny RADAR 3D |
| Kąty skanowania FOV | 360° × 90° | 86° × 57° (土3°) | 120° × 75° |
| Skanowanie niepowtarzalne (Non-repetitive scanning) | TAK | ||
| Metoda skanowania | Skanowanie obicia laserów w lustrze (Non-contact brushless rotating mirror scanning) | Centralny obiektyw | Skanowanie stałe (Solid or quasi-solid state scanning) |
| Zużycie procesora CPU podczas przesyła danych | Bardzo niskie | Wysokie | Wysokie |
| Odległość skanowania | 30m | 4-5m | 30m |
| Minimalny obszar niewidoczny (Nearby blind area) | 5 cm | 10 cm | 30cm |
| IMU | Przyspieszenie 3-osiowe + żyroskop 3-osiowy (3-axis acceleration + 3-axis gyroscope) | ||
| Moc/pobór | 6W | 5W | 12W |
| Wymiary zewnętrzne mm | 75×75×65mm | 90×25×25mm | 100×130×65mm |
| Waga | 230g | 100g | 500g |
| Środowisko pracy | wewnątrz/na zewnątrz | wewnątrz/na zewnątrz | wewnątrz/na zewnątrz |
| Technologia pracy | Laser TOF | Soczewka -podczerwień | Laser TOF |