LASEROWY LIDAR L1
Bioniczny radar laserowy 4D
Zapytaj o wycenę
Formularz poniżej lub e-mail: robot@unitree-robot.pl
Pierwszy na Rynku Bioniczny LIDAR 4D z Ultra-szerokokątnym Skanowaniem
Unitree Robotics, firma znana z innowacyjnych rozwiązań w dziedzinie robotyki, wprowadziła na rynek najnowszy bioniczny LIDAR 4D o nazwie L1, który ma na celu przyspieszenie wprowadzenia zaawansowanych robotów mobilnych do codziennego życia. To przełomowe rozwiązanie technologiczne opiera się na najnowszych osiągnięciach w dziedzinie skanowania laserowego, co czyni L1 jednym z najnowocześniejszych sensorów dostępnych na rynku.
Kluczowe Parametry Techniczne LIDAR L1
- Omnidirectional Ultra-wide-angle Scanning (360° x 90°):
- LIDAR L1 oferuje pełne, 360-stopniowe skanowanie w poziomie oraz 90-stopniowy kąt skanowania w pionie. Taka konfiguracja umożliwia uzyskanie niemal pełnej panoramy otoczenia, minimalizując martwe strefy i zapewniając dokładne odwzorowanie przestrzeni w każdych warunkach.
- Minimalna Strefa Martwa:
- L1 wyróżnia się wyjątkowo niską strefą martwą, która wynosi zaledwie 0,05 metra. To kluczowe w sytuacjach, gdzie precyzyjne wykrywanie obiektów w bliskiej odległości jest niezbędne do zapewnienia bezpieczeństwa i skuteczności działania robota.
- Długodystansowy Zasięg:
- Przy refleksyjności 90%, LIDAR L1 osiąga zasięg skanowania do 30 metrów, co pozwala na wykrywanie przeszkód i szczegółów otoczenia z dużej odległości. To niezwykle istotne dla robotów działających w zróżnicowanych środowiskach, gdzie dokładne mapowanie terenu jest kluczowe.
- Wysoka Częstotliwość Efektywna:
- L1 operuje z częstotliwością 21600 punktów na sekundę, co umożliwia szybkie i precyzyjne zbieranie danych, niezbędnych do tworzenia trójwymiarowych map otoczenia. Dzięki temu roboty mogą nawigować z większą pewnością i płynnością, nawet w dynamicznych środowiskach.
- Kompaktowe Wymiary i Lekka Konstrukcja:
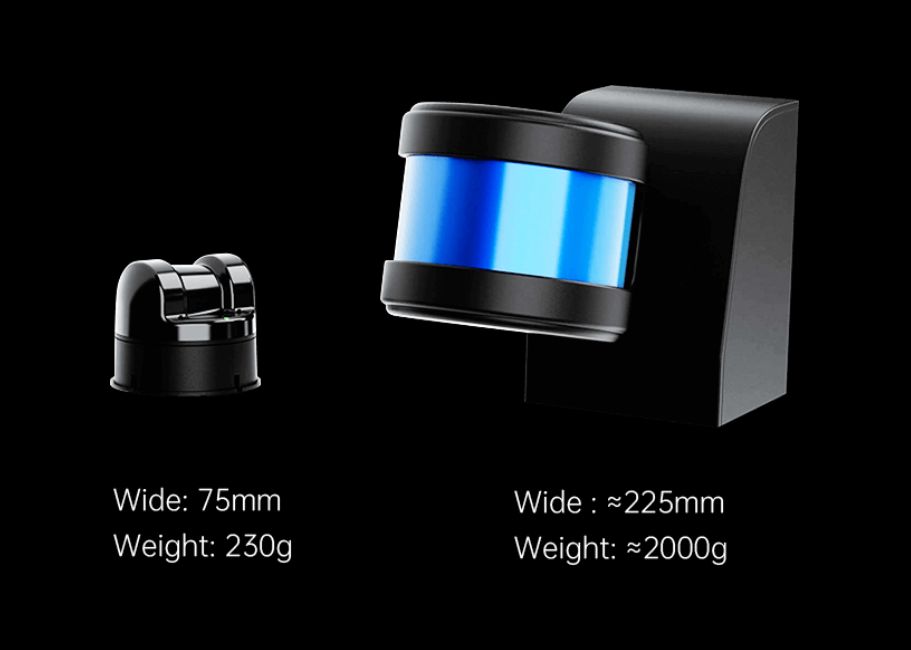
- Sensor L1 waży jedynie 230 gramów, a jego wymiary to 75x75x65 mm. Taka konstrukcja pozwala na łatwą integrację z różnorodnymi modelami robotów mobilnych, bez obciążania ich struktury i wpływania na ich zdolność manewrowania.
Podstawowe dane techniczne
| Zakres skanowania | 360×90 stopni |
| Inercyjna jednostka pomiarowa IMU | 3-osiowe przyspieszenie + 3-osiowy żyroskop |
| Technologia | Laserowa TOF |
| Metoda skanowania | Skanowanie z obrotowym lustrem |
| Środowisko pracy | Na zewnątrz/wewnątrz |
Przełom w Mobilności Robotów
Wprowadzenie bionicznego LIDAR-u 4D L1 przez Unitree Robotics to istotny krok naprzód w dziedzinie mobilnej robotyki. Dzięki zaawansowanej technologii skanowania, L1 umożliwia robotom nie tylko dokładniejsze mapowanie i nawigację, ale także optymalizację kosztów produkcji i eksploatacji.
LIDAR L1 jest idealnym rozwiązaniem dla nowoczesnych robotów, które muszą operować w różnorodnych, często trudnych warunkach. Jego zaawansowane funkcje pozwalają na realizację złożonych zadań, od autonomicznej nawigacji po precyzyjne mapowanie terenu, co czyni go nieocenionym narzędziem w rozwoju inteligentnej robotyki.
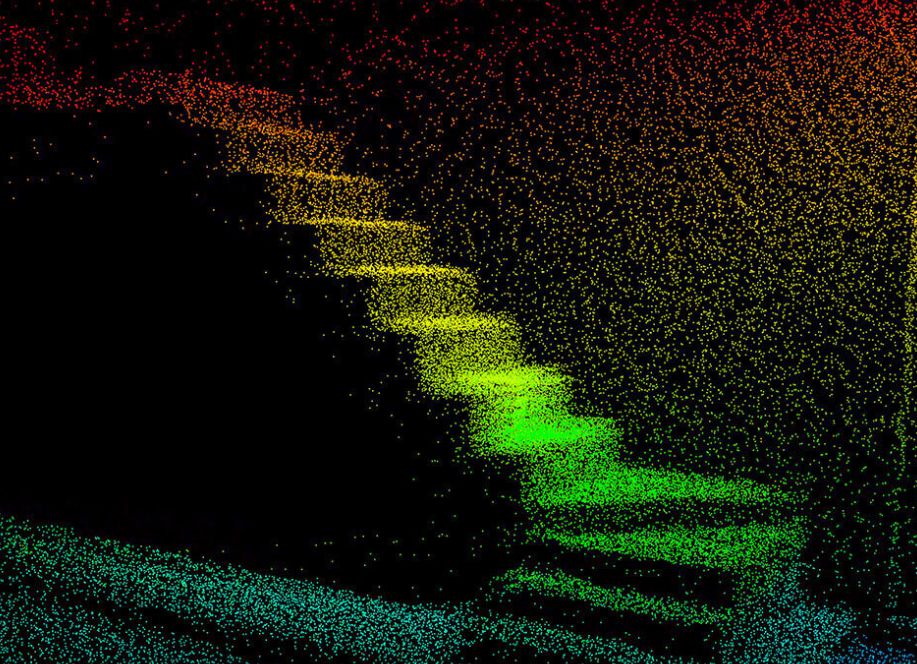
Dynamiczne skanowanie całego domu
Mapowanie pomieszczeń skanerem laserowym LIDAR L1
Kompaktowy rozmiar
Kompaktowy rozmiar 75×75×65mm
Waży tylko 230 g, co zapewnia łatwą instalację
Ultra szeroki kąt
Duże dookólne pole widzenia (pole widzenia 360×90 stopni

Jesteś zainteresowany
Prześlij zapytanie, skonfigurujemy dla Ciebie robota.
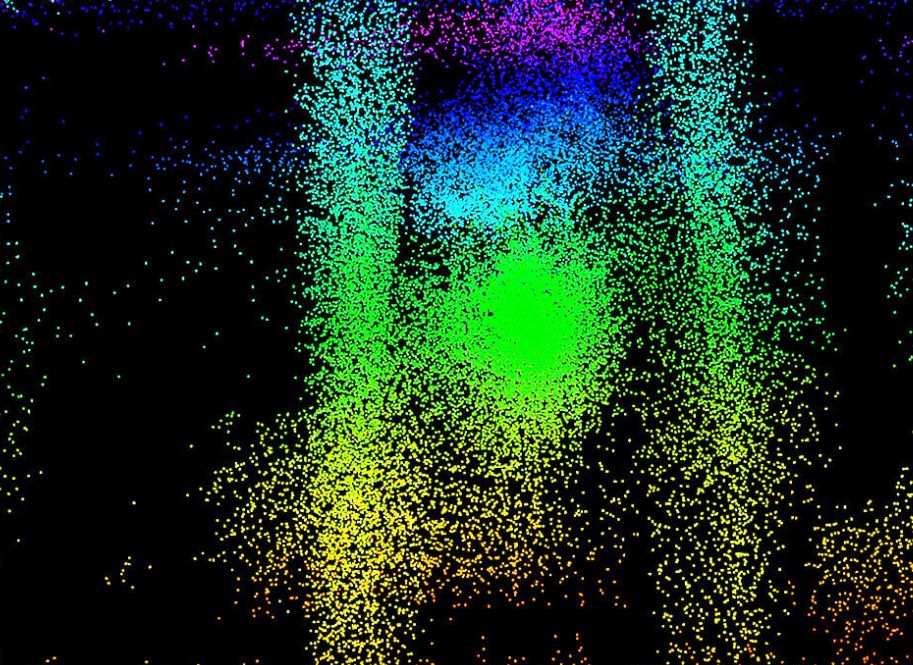
Wykrywanie różnych obiegów przezroczystych
Kluczowe Parametry Techniczne:
Zastosowanie w Robotyce Mobilnej: LIDAR L1 idealnie sprawdza się w robotach, które poruszają się w przestrzeniach zamkniętych i otwartych, wymagających precyzyjnego mapowania terenu. Wysoka gęstość punktów pozwala na skuteczną nawigację w złożonych i dynamicznych środowiskach, zapewniając robotom płynne omijanie przeszkód oraz dokładną orientację przestrzenną.
Gęstość Chmury Punktów: LIDAR L1, klasy motoryzacyjnej, generuje około 1,5 miliona punktów na sekundę. Dla porównania, w zastosowaniach motoryzacyjnych przy prędkościach do 200 km/h (55 m/s), gęstość chmury punktów wynosi zaledwie 27,000 punktów na metr. Tymczasem w przypadku małych robotów mobilnych, które poruszają się znacznie wolniej (zwykle poniżej 1 m/s), gęstość chmury punktów L1 na metr jest porównywalna do tej z systemów motoryzacyjnych, zapewniając tym samym doskonałe odwzorowanie otoczenia.
LIDAR L1 – Technologia Dopasowana do Potrzeb Małych i Średnich Robotów Mobilnych
LIDAR L1 to zaawansowany sensor laserowy, który idealnie spełnia wymagania małych, konwencjonalnych robotów mobilnych. Jego technologia skanowania oparta na generowaniu gęstości punktów chmury w czasie rzeczywistym zapewnia precyzyjne odwzorowanie otoczenia, niezbędne do autonomicznej nawigacji oraz mapowania.
Dlaczego LIDAR L1?
LIDAR L1 to przełom w technologii czujników dla małych i średnich robotów mobilnych, oferujący precyzyjne mapowanie z dużą gęstością chmury punktów, porównywalne z systemami stosowanymi w motoryzacji. Dzięki temu małe roboty mogą działać z większą precyzją i efektywnością, zapewniając stabilną i niezawodną pracę w różnych warunkach, od magazynów po zewnętrzne przestrzenie przemysłowe.
Porównanie parametrów technicznych LIDAR-u L1, Kamery głębi podczerwieni oraz 3D Radaru
| MODEL | LIDAR UNITREE L1 | Kamera głębi podczerwieni | Szerokokątny RADAR 3D |
| Kąty skanowania FOV | 360° × 90° | 86° × 57° (土3°) | 120° × 75° |
| Skanowanie niepowtarzalne (Non-repetitive scanning) | TAK | ||
| Metoda skanowania | Skanowanie obicia laserów w lustrze (Non-contact brushless rotating mirror scanning) | Centralny obiektyw | Skanowanie stałe (Solid or quasi-solid state scanning) |
| Zużycie procesora CPU podczas przesyła danych | Bardzo niskie | Wysokie | Wysokie |
| Odległość skanowania | 30m | 4-5m | 30m |
| Minimalny obszar niewidoczny (Nearby blind area) | 5 cm | 10 cm | 30cm |
| IMU | Przyspieszenie 3-osiowe + żyroskop 3-osiowy (3-axis acceleration + 3-axis gyroscope) | ||
| Moc/pobór | 6W | 5W | 12W |
| Wymiary zewnętrzne mm | 75×75×65mm | 90×25×25mm | 100×130×65mm |
| Waga | 230g | 100g | 500g |
| Środowisko pracy | wewnątrz/na zewnątrz | wewnątrz/na zewnątrz | wewnątrz/na zewnątrz |
| Technologia pracy | Laser TOF | Soczewka -podczerwień | Laser TOF |