Ramię robota Z1
Uniwersalna programowalna platforma robota
Zapytaj o wycenę
Formularz poniżej lub e-mail: robot@unitree-robot.pl
Ramię robota Z1
Ramię robota Z1 to nowoczesne, kompaktowe i lekkie rozwiązanie, które cechuje się elastycznością i precyzją. Dzięki wystarczającemu udźwigowi i dokładności, ramię to może być montowane na robotach czworonożnych, takich jak Aliengo lub B1, a także może pełnić funkcję autonomicznej platformy mobilnej. Programowalność ramienia pozwala na dostosowanie go do różnych zadań.
Kluczowe cechy techniczne:
- Kompaktowość i lekkość: Umożliwia łatwy montaż i manewrowanie.
- Zręczność i elastyczność: Wysokie możliwości manipulacji i wykonywania precyzyjnych ruchów.
- Wystarczający udźwig i dokładność: Gwarantują stabilną i dokładną obsługę obiektów.
- Wsparcie dla siłowego sterowania przegubów: Funkcja kontrolowania siły w poszczególnych przegubach.
- Ochrona przed kolizjami: Zabezpieczenie w przypadku zderzenia z obiektami.
- Otwarty interfejs programistyczny: Umożliwia programowanie i dostosowanie funkcji do własnych potrzeb, z opcją szybkiej wymiany końcówek manipulacyjnych.
Podstawowe dane techniczne
| System programowania | Ubuntu |
| Maksymalny zasięg ramienia | 740mm |
| Udźwig | 2kg-3kg (AIR-PRO) |
| Waga | 4,3kg- 4,5kg (AIR-PRO) |
| Dokładność/powtarzalność | 0,1mm |
Zastosowanie: Ramię Z1 idealnie sprawdza się w zastosowaniach takich jak logistyka e-commerce, nowoczesna konsumpcja, codzienne życie, a także w różnorodnych robotach mobilnych. Dzięki synergii z robotami czworonożnymi, takimi jak Aliengo i B1, ramię to umożliwia realizację skomplikowanych zadań oraz eksplorację różnorodnych scenariuszy aplikacyjnych Ramię możemy również stosować jako oddzielny (bez robota) manipulator do indywidualnych potrzeb..
Mobilna programowalna platforma robotyczna pozwala na wiele zastosowań
Robot pies wyposażony w ramię Z1 otwiera drzwi. Współpracuje z robotem Aliengo, B1 oraz innymi robotami
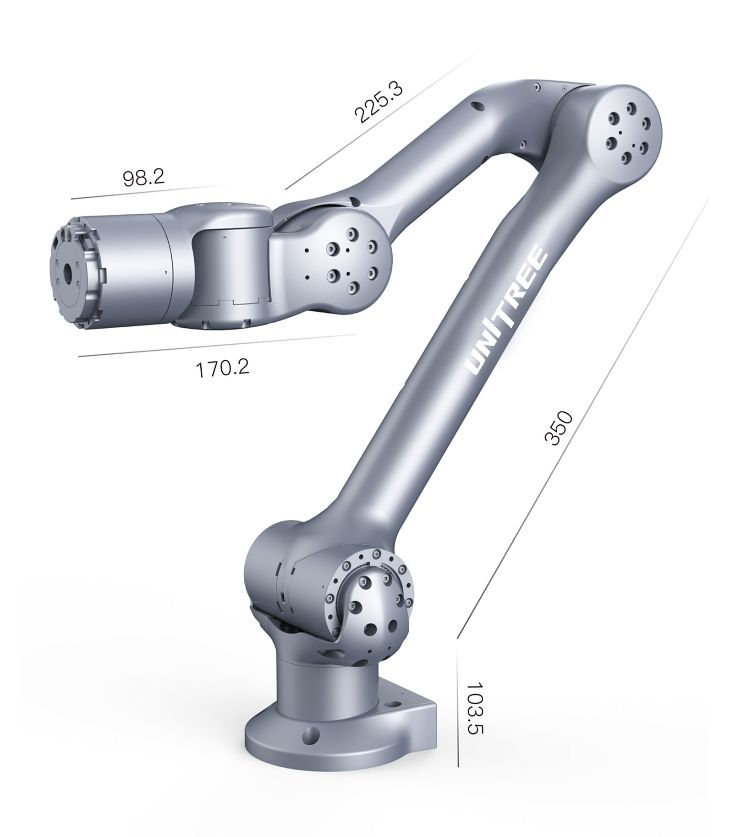
Kompaktowy rozmiar
Długoś dłuższego ramienia 350mm, krótszego 290mm, manipulator 97,2mm, podstawa 95mm
Waga: 4,1 kg – 4,3 kg
Szeroki zakres ruchów
Duże dookólne pole widzenia (pole widzenia 360×90 stopni

Jesteś zainteresowany
Prześlij zapytanie, skonfigurujemy dla Ciebie robota.
Silnik napędowy ramienia robota

Parametry techniczne silnika robota Z1
Silnik robota Z1 został zaprojektowany z myślą o wysokiej precyzji oraz wydajności. Oto kluczowe parametry techniczne tego modelu:
- Luz kątowy (Backlash): ~6 arcmin
- Metoda komunikacji: RS 485
- Maksymalny moment obrotowy: 33 N·m
- Rozdzielczość enkodera: 15 bit
- Waga: 405 g
- Dokładność kontroli siły: ~0.2 N·m
- Wymiary: Φ65 mm x 52 mm
- Częstotliwość sterowania: 1 kHz
- Reduktor: Harmoniczny
- Łożyska: Przemysłowe łożysko krzyżowo-walcowe
- Przełożenie: 60+
- Sprzężenie zwrotne silnika: Moment obrotowy, kąt, prędkość kątowa
- Napięcie: 24V (zalecane)
- Komendy sterowania silnikiem: Moment obrotowy, kąt, prędkość kątowa, sztywność, tłumienie
Parametry techniczne ramienia robota Z1 – Wersje AIR oraz PRO
Ramię robota Z1 dostępne jest w dwóch wersjach: Z1 AIR (podstawowa) oraz Z1 PRO (zaawansowana), które różnią się wagą, udźwigiem oraz innymi kluczowymi parametrami technicznymi. Oto szczegółowy opis parametrów obu wersji:
Podstawowe dane techniczne:
- Model: Z1 AIR / Z1 PRO
- Stopnie swobody (DOF): 6 osi
- Waga: Z1 AIR – 4,3 kg, Z1 PRO – 4,5 kg
- Udźwig: Z1 AIR – 2 kg, Z1 PRO – ≥3 kg
- Zasięg: 740 mm
- Powtarzalność: ~0,1 mm
- Zasilanie: Napięcie 24V, Prąd >20A
- Interfejs: Ethernet
- System operacyjny użytkownika: Ubuntu
- Maksymalna moc: 500W
- Sprzężenie siłowe i wykrywanie kolizji: Obsługiwane
- Interfejs sterowania: Pozycja + kontrola siły
Parametry osi i zakres ruchu:
- J1 (zakres ruchu): ±150°, Maksymalna prędkość: 180°/s
- J2 (zakres ruchu): 0-180°, Maksymalna prędkość: 180°/s
- J3 (zakres ruchu): -165° do 0°, Maksymalna prędkość: 180°/s
- J4 (zakres ruchu): ±80°, Maksymalna prędkość: 180°/s
- J5 (zakres ruchu): ±85°, Maksymalna prędkość: 180°/s
- J6 (zakres ruchu): ±160°, Maksymalna prędkość: 180°/s

Ramię robota zaprogramowane do nalewania napojów
Dane techniczne
| MODEL | Z1 AIR | Z1 PRO |
|---|---|---|
| DOF | 6 osiowy | 6 osiowy |
| Waga | 4,5 kg | 4,5 kg |
| Udźwig | 2 kg | 3 kg |
| Zasięg ramienia | 740mm | 740mm |
| Powtarzalność/dokładność (1) | 0,1mm | 0,1mm |
| Zasilanie | 24V, 20A | 24V, 20A |
| Interfejs | Ethernet | Ethernet |
| System operacyjny programowania | Ubuntu | Ubuntu |
| Moc | max 500W | max 500W |
| Sprzężenie zwrotne i wykrywanie kolizji | TAK | TAK |
| Interfejs sterowania (2) | Pozycja ramienia i siła ramienia | Pozycja ramienia i siła ramienia |
[1] Zależy od rzeczywistych testów przeprowadzonych zgodnie z wymaganiami użytkowania (standardy testowania manipulatorów różnią się znacząco, a dokładność może się bardzo różnić w zależności od warunków testowych).
[2] Ze względu na stosunkowo niski współczynnik redukcji używany w każdym przegubie, sztywność kontroli pozycji całej maszyny jest niska. Jeśli tryb sterowania nie zostanie zoptymalizowany, mogą wystąpić duże błędy w kontroli pozycji oraz drgania podczas ruchu manipulatora.
[3] Ten produkt to cywilny robot. Uprzejmie prosimy wszystkich użytkowników o powstrzymanie się od niebezpiecznych modyfikacji lub używania robota w sposób stwarzający zagrożenie.
[4] Prosimy odwiedzić stronę internetową Unitree-robot.pl, aby uzyskać więcej informacji na temat warunków użytkowania i polityk oraz przestrzegać lokalnych przepisów i regulacji.