Robot Unitree B2-W
Duży robot przemysłowo-terenowy o wielu funkcjach
Zapytaj o wycenę
Formularz poniżej lub e-mail: robot@unitree-robot.pl
Unitree B2-W Przekraczaj Granice w Zastosowaniach Przemysłowych
- Najszybszy przemysłowy robot czworonożny – prędkość do 6 m/s.
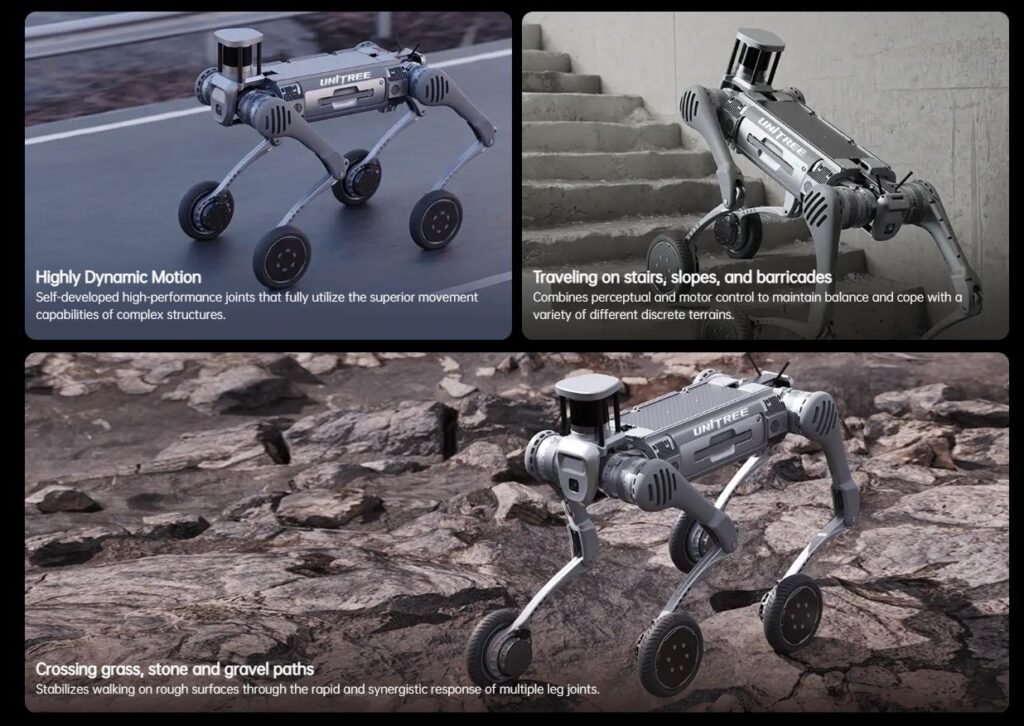
- Wszechstronność i niezawodność w różnych środowiskach.
- Doskonała adaptacja do terenu – stabilna praca na śliskich lub nierównych powierzchniach.
- Bezproblemowe pokonywanie schodów – jakby były płaskie.
- Niezrównana stabilność podczas wspinania się po schodach, łatwo pokonuje stopnie, zachowując równowagę.
- 170% wzrost wydajności stawów – moment obrotowy 360 N.m.
- Ekstremalne osiągi zapewniające większą elastyczność i stabilność w operacjach przemysłowych.
- Pokonywanie przeszkód – stabilny i wytrzymały. Łatwo przekracza stosy drewna, platformy o wysokości 40 cm i inne przeszkody.
- 100% wzrost wytrzymałości i 200% zwiększenie zasięgu
- 100% wzrost wytrzymałości – ciągły marsz z obciążeniem większym niż 40 kg.
- Marsz z obciążeniem 20 kg może trwać ponad 4 godziny, z zasięgiem ponad 15 km.
- 200% zwiększenie zasięgu – ciągły marsz bez obciążenia z zasięgiem większym niż 20 km przez ponad 5 godzin.
- Formy kołowe i czworonożne – przełamywanie ograniczeń wytrzymałości.
- Innowacyjny design strukturalny B2 umożliwia przełączanie między formą czworonożną a kołową (opcja).
Podstawowe dane techniczne
| Wymiary w pozycji stojącej | 1098mmx450mmx645mm |
| Waga wraz z baterią | Około 75kg |
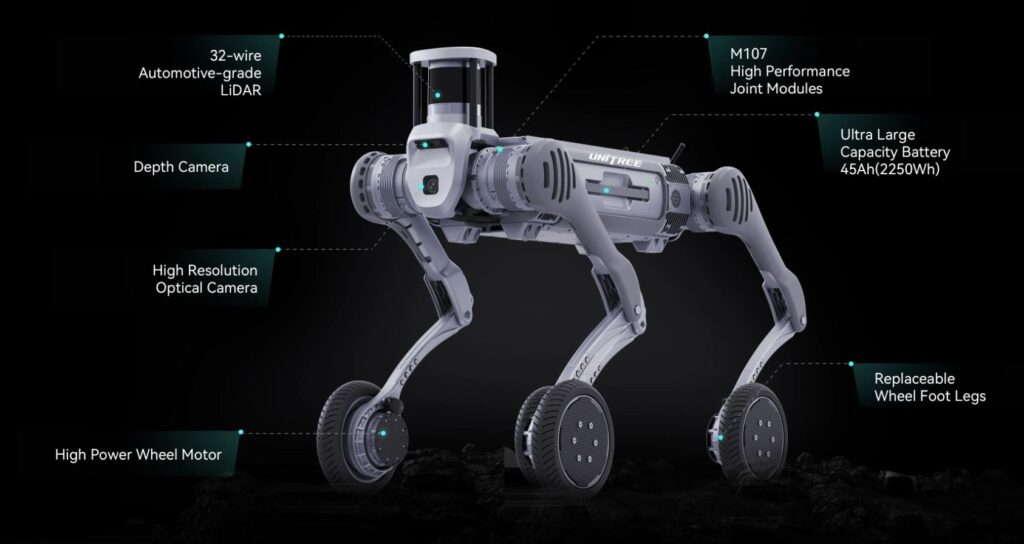
| LIDAR i kamera | 3D LiDAR ×1 + Kamera głębi ×2 + Kamera optyczna ×2 (Różni się w zależności od konfiguracji) |
| Maksymalne obciążenie robota | W pozycji stojącej 120 kg. Podczas chodzenia około 40 kg |
| Pokonywanie przeszkód | Schody o wysokości 20cm=25cm |
| Temperatura pracy | od -20 do +50 stopni C |
| Odporność na wodę. | Klasa szczelności IP67 |
Robot B2-W jest wyposażony w koła
Robot B2 w szybkim tempie pokonuje wysokie schody. Zachowuje równowagę, trudno go zatrzymać.
Robot B2-W pokona nawet 20 km na jednym ładowaniu
Robot przemysłowy B2 potrafi konać trudny teren. Na płaskich powierzchniach porusza się bardzo szybko i może pokonać odległość do 20km na jednym ładowaniu. Dodatkowo obudowa robota jest wykonana w normie szczelności IP67 dzięki czemu robot porusza się w deszczu. Odpowiednie algorytmy zapewniają wysoką stabilność na wiatr i boczne uderzenia. Temperatura pracy robota od -20 stopni do + 50 stopni.

Jesteś zainteresowany
Prześlij zapytanie, przygotujemy ofertę.
Wysoka szczelność (IP67) robota B2-W oraz B2 pozwala na poruszanie się w dużym strumieniu wody
Wymienna bateria w robocie
Pojemność akumulatora 45 Ah (2250 Wh)
Napięcie 58 V
Żywotność baterii 4-6h
Rozpoznawanie ludzi, interakcje
Bezprzewodowe ładowania robota
Robot przy niskim stanie sam znajduje ładowarkę
Szybki moduł ładowania
Szybka wymiana baterii bez narzędzi
Silniki, czujniki nacisku, złącza
Robot jest wyposażony w szereg złącz
Silnik
- Moment obrotowy przegubu: 360 Nm (MAX)
- Maksymalna prędkość przegubu: 21 rad/s
- Przeguby pozwalają na szybki demontaż i łatwą konserwację
- Przemysłowe łożyska wałeczkowe krzyżowe o długiej żywotności i odporności na wstrząsy osiowe
- Odczyt wszystkich danych z czujników
- Możliwość przesyłania osobnych poleceń dotyczących pozycji, prędkości i momentu obrotowego do każdego silnika

Cztery koła napędowe zapewniają wysoką zwrotność
- Dokładny dostęp do informacji o podparciu stóp jest bardziej niezawodny, wydajny i wygodny.
Bogate interfejsy zewnętrzne
- 1000M-Base-Ethernet×4 USB3.0×4
- 12V×4 5V×1 24V×4 BAT×1
Robot pies B2-W porusza się doskonale zarówno na płaskich powierzchniach jak i w terenie
Stabilizacja oraz wysoki moment obrotowy silników
Mapowanie 3D LiDAR
Dzięki opcjonalnemu LiDAR-owi i dedykowanej aplikacji możesz stworzyć mapę w chmurze punktów w określonym obszarze i określić ścieżkę, po której robot będzie się poruszać autonomicznie.
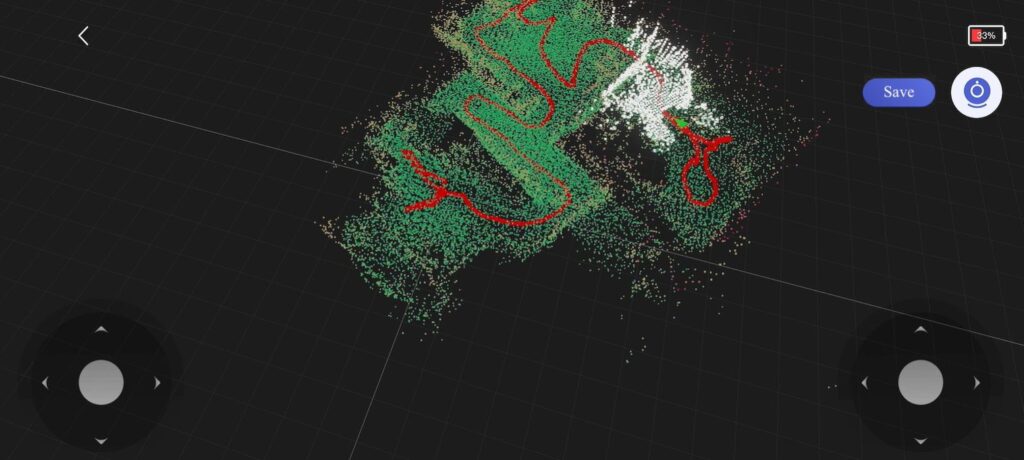
Tabela paramentów technicznych
| B2-W | Dane |
|---|---|
| Wymiary w pozycji stojącej | 1098 mm × 450 mm × 645 mm |
| Waga całkowita wraz z baterią | 60 kg |
| Maksymalny udźwig w pozycji stojącej | do 120 kg |
| Maksymalny udźwig podczas chodu | do 40 kg |
| Czas pracy | od 2h do 4h (w zależności od wykorzystanie robota) |
| Maksymalna prędkość poruszania | 15 km/h (ograniczona ze względu na bezpieczeństwo) |
| Zabezpieczanie przed upadkiem | Algorytm |
| Materiał | Wytrzymałe tworzywo konstrukcyjne |
| Czujniki nacisku w nodze robota | Aktywny czujnik nacisku |
| Pokonywanie trasy | Chodzenie bez obciążenia > 5h, przebieg > 20km Chodzenie z obciążeniem 20kg > 4h, przebieg> 15km |
| Złącza zewnętrzne | 1000M-Base-Ethernet×4 USB3.0×4 12V×4 5V×1 24V×4 BAT×1 |
| Pokonywanie schodów | wysokość 20cm-25cm |
| Kąt nachylenia schodów i terenu | do 45 stopni |
| Pokonywanie przeszkód | do wysokości 40cm |
| Przechodzenie nad pustą przestrzenią | 0,5m do 1,2m |
| Maksymalny skok | do 1,6m |
| Błąd pomiaru w zasięgu 2m | < 2% |
| Rozpoznawanie ludzi | TAK |
| Rozpoznawanie gestów | TAK |
| Poruszanie się za ludźmi | W zasięgu wizualnym oraz LIDAR 3D |
| Uczenie maszynowe | TAK |
| Szerokokątna kamera HD | TAK |
| Transmisja w czasie rzeczywistym | TAK |
| Omijanie przeszkód w czasie rzeczywistym | TAK |
| LIDAR | Mapowanie, pozycjonowanie, dynamiczne omijanie |
| Wodoszczelność | Stopień ochrony IP67 |
| Moduł sterowania i kontroli | Konfiguracja standardowa: Intel Core i5 (funkcja platformy), Intel Core i7 (rozwój użytkownika) Opcjonalna konfiguracja: Intel Core i7 i Jetson Orin NX (maksymalnie do 3 urządzeń) |
| Czujniki i nawigacja | 3D LiDAR ×1 + Kamera głębi ×2 + Kamera optyczna ×2 (Różni się w zależności od konfiguracji) |
| Wymienne czujniki nacisku na końcówce nogi | TAK |
Ważne wskazówki i uwagi:
Ten produkt jest robotem cywilnym. Uprzejmie prosimy, aby wszyscy użytkownicy powstrzymali się od dokonywania niebezpiecznych modyfikacji lub używania robota w sposób niebezpieczny.
W praktyce ze względów bezpieczeństwa obowiązuje ograniczenie prędkości
Część funkcji wymaga pracy człowieka lub wtórnego programowania
Powyższe parametry mogą się różnić w różnych scenariuszach zastosowań i różnych konfiguracjach, proszę odnieść się do rzeczywistej sytuacji.