Humanoidalny G1
Robot humanoidalny G1 potrafi więcej niż myślisz
Zapytaj o wycenę
Formularz poniżej lub e-mail: robot@unitree-robot.pl
G1 – Humanoidalny Robot Nowej Generacji
Elastyczność Wykraczająca Poza Możliwości Człowieka
Robot G1 wyróżnia się niezwykle dużym zakresem ruchu stawów, wyposażonym w 23 do 43 silników, co pozwala mu na wykonywanie ruchów, których nie są w stanie osiągnąć ludzie.
Nauka Poprzez Imitację i Wzmocnienie
Dzięki zaawansowanej technologii opartej na sztucznej inteligencji, robot G1 każdego dnia przechodzi przez proces ulepszania i ewolucji, ucząc się na podstawie imitacji i wzmocnienia.
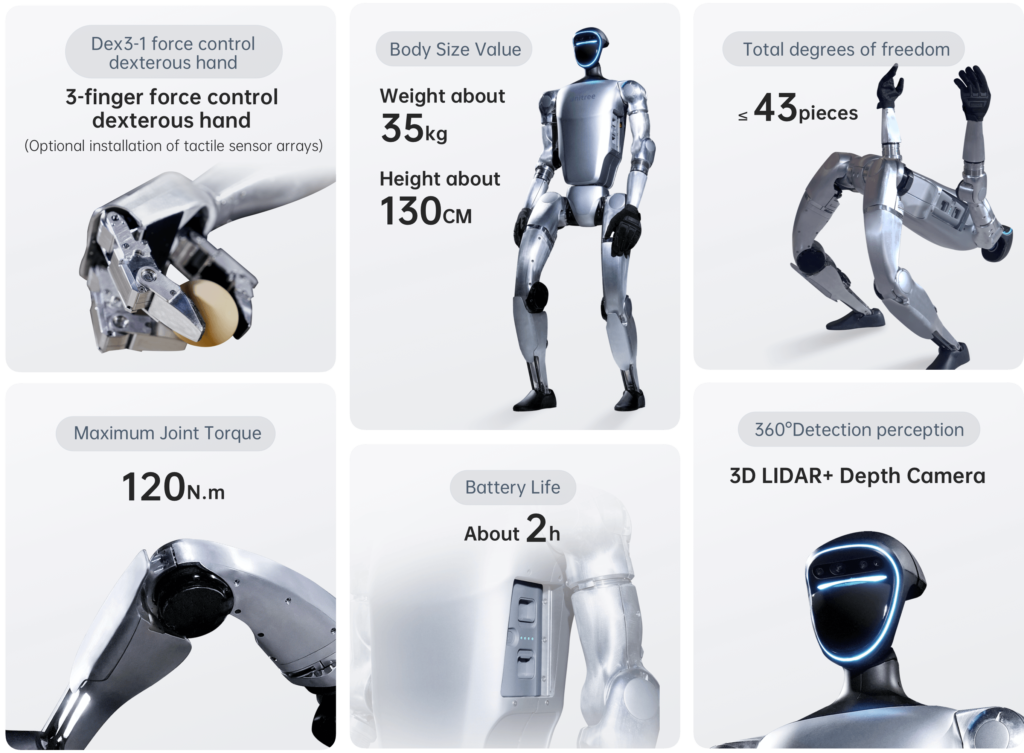
Precyzyjna Kontrola Siły i Zręczna Dłoń
G1 posiada złożony system hybrydowej kontroli siły i pozycji, który umożliwia mu precyzyjne manipulowanie różnorodnymi obiektami, naśladując przy tym ludzką rękę. Dzięki temu jest niezwykle czuły i niezawodny w działaniu.
Światowy Model Robota G1 – Twórzmy Go Razem
Wprowadzamy UnifoLM (Unitree Robot Unified Large Model), czyli zjednoczony model sztucznej inteligencji, który pozwala na tworzenie nowej ery inteligencji i współpracę na niespotykanym dotąd poziomie.
Podstawowe dane techniczne
| Wymiary w pozycji stojącej | 130cm |
| Waga wraz z baterią | Około 35 kg |
| Maksymalny czas pracy | około 2h |
| Szerokokątny LIDAR +kamera | Tak |
| Mikrofon + głośniki stereo | Tak |
Możliwości małego robota humanoidalnego G1 wciąż się poszerzają. Otrzymał nowe bardziej zaawansowane układy
Robot G1ma wysokość 132 cm
Robot wyposażony w sensory nacisku precyzyjnie wykonuje zadane mu polecenia
Mały robot humanoid wyposażony w wiele czujników
Mimo, że robot posiada wiele czujników możemy go wyposażyć w dodatkowe moduły takie jak: radar, kamera szerokokątna, ramię robota. Dodatkową opiją jest platforma ładowania. Robot samodzielnie ładuje baterię.

Jesteś zainteresowany
Prześlij zapytanie, przygotujemy ofertę.
Robot nauczył się ćwiczenia z drążkiem
Bezprzewodowa aktualizacje (OTA). Robot stale ulepsza swoje oprogramowanie, aby być inteligentniejszym.
Dzięki autoryzacji użytkownika, robot automatycznie łączy się z usługą OTA w chmurze, aby zaktualizować własne programy w celu ciągłej poprawy funkcjonalności. Robot uczy się wraz z użytkownikiem.

Robot utrzymuje stabilną pozycję dzięki zaawansowanym silnikom i algorytmom
Robot waży jedynie 35 kg więc można go w łatwy sposób transportować
G1 potrafi się złożyć do pozycji transportowej, jego relatywnie niska waga pozwala na łatwy transport np. w samochodzie

Zwiększona wydajność silnika
Go2 może pochwalić się szczytowym momentem obrotowym złącza wynoszącym 45 Nm[1], nową techniką łączenia wewnętrznej ścieżki oraz chłodnicami rurek cieplnych, które skutecznie obniżają temperaturę.
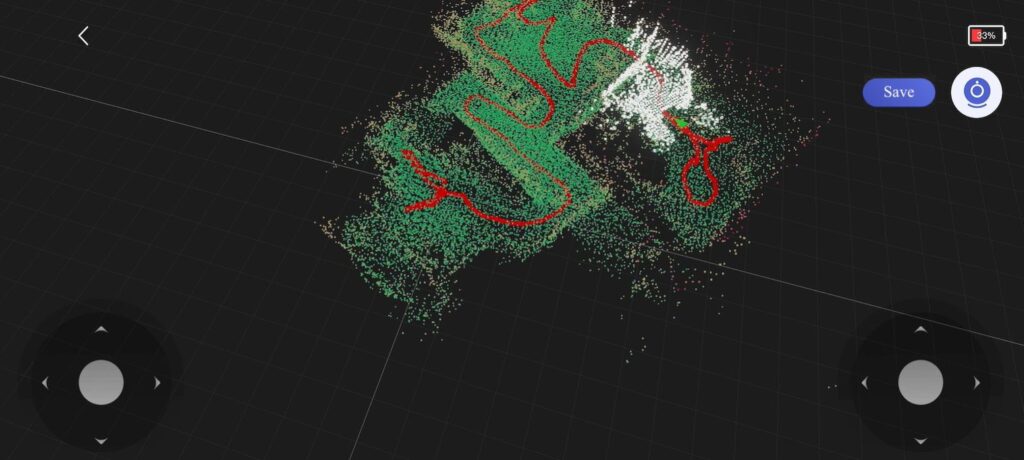
Mapowanie 3D LiDAR
Dzięki L1 LiDAR i dedykowanej aplikacji możesz stworzyć mapę w chmurze punktów w określonym obszarze i określić ścieżkę, po której robot będzie się poruszać autonomicznie.
Podstawowe dane techniczne
G1 diagram techniczny

Tabela paramentów technicznych wersja G1 i G1 EDU
| Model | G1 | G1 EDU |
|---|---|---|
| Wymiary w pozycji stojącej | Wys. 132cm, 40cmx20cm | Wys. 132cm, 40cmx20cm |
| Wymiary w pozycji złożonej | 69cmx45cmx30cm | 69cmx45cmx30cm |
| Waga wraz z baterią | około 35kg | około 35kg + |
| Liczba stopni swobody stawów Total Degrees of Freedom(Joint Freedom) | 23 | 23-45 |
| Pojedyncze stopnie swobody nóg Single Leg Degrees of Freedom | 6 | 6 |
| Talia Stopnie swobody Waist Degrees of Freedom | 1 | 1+(Opcjonalnie 2 dodatkowe stopnie swobody talii) |
| Pojedyncze stopnie swobody ramienia Single Arm Degrees of Freedom | 5 | 5 |
| Stopnie swobody ramienia Single Hand Degrees of Freedom | 7(Opcjonalna kontrola siły dłoni trójpalczastej)+2(Opcjonalnie 2 dodatkowe stopnie swobody nadgarstka) *Dłoń trójpalczasta zręczna Parametr Dex3-1: Kciuk ma 3 aktywne stopnie swobody; palec wskazujący ma 2 aktywne stopnie swobody; palec środkowy ma 2 aktywne stopnie swobody. **Dex3-1 można opcjonalnie zainstalować z matrycami czujników dotykowych | |
| Maksymalny moment obrotowy stawu kolanowego (1) | 90Nm | 120Nm |
| Maksymalne obciążenie ramienia (maksymalny dźwig) (2) | około 2kg | około 3kg |
| Maksymalna długość nogi robota | 60cm | 60cm |
| Rozpiętość ramion robota | około 45cm | około 45cm |
| Zakres ruchów | Staw biodrowy: Z±155° Staw kolanowy: 0~165° Staw biodrowy: P±154°, R-30~+170°, Y±158° | Staw biodrowy: Z±155°, X±45°, Y±30° Staw kolanowy: 0~165° Staw biodrowy: P±154°, R-30~+170°, Y±158° Staw nadgarstkowy: P±92,5°, Y±92,5° |
| Połączenia przewodów elektrycznych Full Joint Hollow Electrical Routing | TAK | TAK |
| Enkoder połączeń | Enkoder podwójny | Enkoder podwójny |
| Układ chłodzenia | Chłodzenie powietrzem | Chłodzenie powietrzem |
| Zasilanie robota | 13-strunowa bateria litowa | 13-strunowa bateria litowa |
| Podstawowa moc obliczeniowa | 8-rdzeniowy procesor o wysokiej wydajności | 8-rdzeniowy procesor o wysokiej wydajności |
| Aktywne sensory | Kamera głębi + LiDAR 3D | Kamera głębi + LiDAR 3D |
| 4 mikrofony | TAK | TAK |
| Głośniki stereo 5W | TAK | TAK |
| Wi-Fi 6, Bluetooth 5.2 | TAK | TAK |
| Moduł o dużej mocy obliczeniowej | NVIDIA Jetson Orin | |
| Inteligentna bateria (szybka wymiana) | 9000mAh | 9000mAh |
| Ładowarka | 54V 5A | 54V 5A |
| Kontroler sterowania zdalnego | TAK | TAK |
| Czas pracy | około 2h | około 2h |
| Integracja i aktualizacja oprogramowania OTA | TAK | TAK |
| Programowania wtórne (3) | TAK | |
- (1) Maksymalny moment obrotowy w tabeli odnosi się do maksymalnego momentu obrotowego największego silnika stawowego; rzeczywisty maksymalny moment obrotowy różni się dla wszystkich silników stawowych.
- (2) Maksymalne obciążenie ramienia znacznie się różni w zależności od pozycji wyprostu ramienia.
- (3) Aby uzyskać więcej informacji, przeczytaj podręcznik zaawansowany programowania wtórnego
Ważne wskazówki i uwagi:
Robot humanoidalny ma złożoną strukturę i dużą moc. Użytkownicy proszeni są o zachowanie odpowiedniej bezpiecznej odległości między robotem humanoidalnym. Należy zachować ostrożność.
Niektóre przykładowe funkcje są nadal rozwijane i testowane i zostaną udostępnione użytkownikom w przyszłości.
Ten produkt jest robotem cywilnym. Uprzejmie prosimy wszystkich użytkowników o powstrzymanie się od dokonywania niebezpiecznych modyfikacji lub używania robota w sposób niebezpieczny.